
Movimiento- interacción robot y cuerpo humano
El proyecto investigó y desarrolló un dispositivo robótico reactivo a partir del hackeo de un auto de juguete, para dialogar con el cuerpo humano y producir gestualidades específicas, reconociendo los rangos posibles de movimiento en la interacción humano-maquina. Así como, explorar nuevas metodologías en el campo de la producción CT, a partir de la combinación de técnicas, lenguajes artísticos y científicos.
PROTOBODY 1.0 da continuidad a los proyectos anteriores, desarrollando una investigación sobre la relación humano-dispositivos, enfocada en el cuerpo en movimiento, su modulación a partir de dispositivos tecnológicos,interacción que da por resultado generar de gestualidades específicas propiciada por el cruce de diversos actuadores tanto artificiales como orgánicos.
En este contexto se pretende descifrar los propios procedimientos de creación en CT que posibiliten problematizar la estructuras tradicionales de producción de obra escénica, donde , en tanto materia cuerpo-arte-tecnología se contaminan mutuamente en los proceso de creación-aprendizaje; y exponer los procesos de creación-investigación, como ejercicios de obra.

Human-machine-interaction
PROTOBODY 1.0 researched and developed a robotic reactive device from hacking of a toy car. The robot dialogue with the human body recognizing a possible ranges of moviment in the human-machine interaction. Explores new methodologies in BT (BodyTechnology) through the combination of technical, scientific and artistic languages.
PROTOBODY 1.0 is a tracking of the previous projects, realized about human body with technological devices, focused on movement of body. The body is modulated from technologies, creating a dialogue between them that forces the body to establish specific gestures. Haptic technologies will establish control over body movement and gesture.
In this context is to decipher the procedures of creation in BT allow problematize the traditional structures of scenic production given a power to the machine (robotc device) as a body or dancer in a iqual condition.

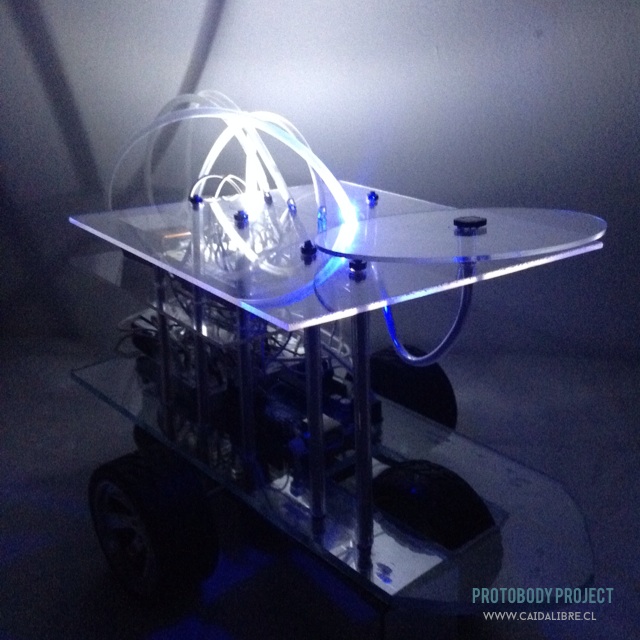





Técnica : physical computinga, cuerpo en movimiento, bajas tecnologías Software y Hardware Libre. Herramientas: Arduino Uno, circuito, sensores lumínicos motores CC, circuito Puente H programado en Arduino. Secuenciador electrónico, metraquilato , plástico, madera y otros materiales.
Desarrollo técnico performance: Brisa MP
PROTOBODY 1.0 realizado en Residencia Artística en Centro de Artes HANGAR, con el financiamiento de Fondo Nacional de Cultura de Chile. Barcelona, junio-julio, 2014.



